技术交流丨信号级信息释放,助力4D毫米波成像雷达步入认知
发布时间:2022-07-11
分享:



2022年7月7日,几何伙伴受邀参加由易贸信息科技与智车行家共同主办的第四届汽车毫米波雷达前瞻技术展示交流会,旨在探讨汽车毫米波雷达传感器与自动驾驶感知领域热点话题,此次会议云集产业链上下游知名企业以及科研院所行业专家。
第四届汽车雷达前瞻技术展示交流会现场
4D毫米波成像雷达凭借着输出信息量、通道数量、角度分辨性能以及输出点数量的优势,在高级别自动驾驶中凸显出不可替代的作用。几何伙伴产品总监周明宇结合4D毫米波成像雷达发展趋势,分享了就4D毫米波成像雷达信息释放的创新方案,受到与会专家以及在场嘉宾的一致认同,4D毫米波成像雷达领域的不断创新必将助力自动驾驶时代加速到来。
感知已然突破
几何伙伴专注于4D毫米波成像雷达领域的研发和应用。目前已在主机厂应用的Ares系列4D毫米波成像雷达可提供高密度、高精度点云数据,勾勒出探测目标三维轮廓,大幅提高自动驾驶感知系统冗余度。此外,几何伙伴创新性地实现了基于4D毫米波成像雷达的SLAM(即时定位和地图构建)功能,可在低算力要求下,实现精准建图和定位,并利用4D毫米波成像雷达全天候、全时段感知特性,实现雨、雪、雾、霾等各种恶劣天气环境下的全时段SLAM功能。
几何伙伴4D毫米波成像雷达点云图
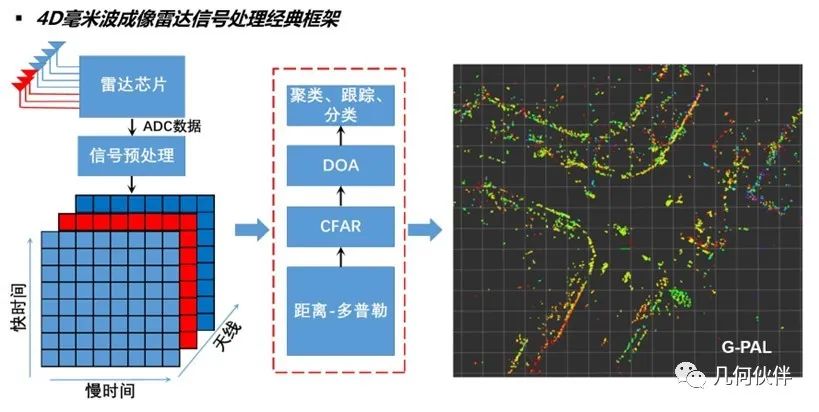
认知成为趋势
由感知走向认知,是4D毫米波成像雷达被业内所期待的。提升目标识别能力及准确性是能否实现认知的关键,这与雷达输出的信息量丰富程度息息相关。
提升信息量最直接的手段为提升其分辨率,包括提升距离分辨率、速度分辨率以及角度分辨率,三者分别由信号有效带宽、信号有效时宽以及阵列孔径和DOA算法决定,但受制于作用距离、采样率、射频带宽、测速范围、数据刷新率、成本、算力、体积、功耗等限制,4D毫米波成像雷达信息量的提升面临瓶颈。
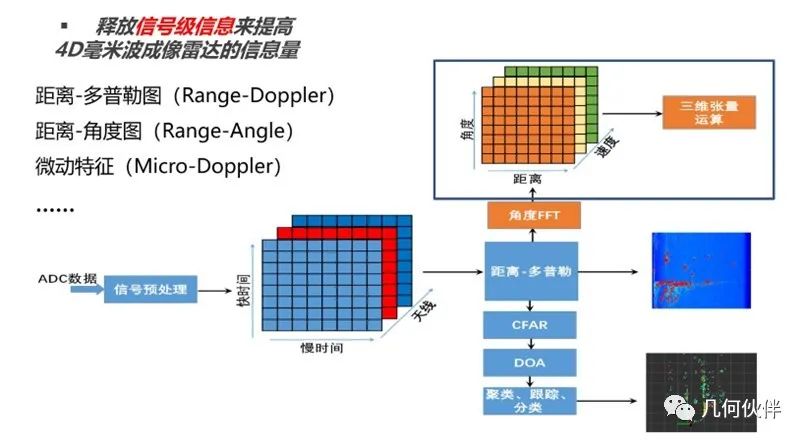
几何伙伴4D毫米波成像雷达的设计思路旨在突破分辨率提升技术瓶颈,在丰富的点云信息的基础上,释放信号级信息提升雷达信息量,包括距离-多普勒图、距离-角度图以及目标微动特征等等,将这些信息与丰富的点云信息相融合,提升雷达认知能力。
几何伙伴信号级信息释放助力雷达认知
融合期待探索
伴随着愈加复杂的驾驶场景,多模态、多任务、混合策略将成为未来自动驾驶感知领域发展的重要方向。
为提高多源融合感知系统的目标检测率和稳定性,几何伙伴团队围绕视觉像素信息在BEV(鸟瞰图)层面的深度前融合进行了探索,并取得一定进展,未来将应用于雷视融合产品中进行落地。
多源信息融合的实现,还需要拥有完备的数据闭环系统,作为致力于成为自动驾驶和智能网联汽车全球Tier 1的高新技术和专精特新企业,几何伙伴已开发研制自有数据闭环系统,并已用于多源信息融合技术开发中。随着数据的不断积累和技术不断迭代,这些系统也将保持不断更新。
持续创新,不断突破,几何伙伴必将在自动驾驶领域释放更大潜力。携手合作伙伴一起,助力更高级别自动驾驶时代加速到来。