几何伙伴行泊一体域控方案:为辅助驾驶打造“集智提效”智慧大脑
发布时间:2025-06-06
分享:



几何伙伴自主研发的行泊一体辅助驾驶域控制器,以“软硬件高度集成+高性价比量产能力”为核心,为驾乘体验更加安全、拟人的辅助驾驶系统打造超强大脑。
当下,汽车产业智能化进程不断深入,整车电子电气架构从分布式向中央计算+区域控制模式加速转型,辅助驾驶域控制器市场也进入了高速发展阶段。根据高工智能汽车研究院监测数据,2024年中国市场乘用车(不含进出口)前装标配辅助驾驶域控方案上险量达到358.69万台,同比增长65.34%,其中超20%为软硬一体域控方案。随着辅助驾驶功能市场渗透率持续提升,辅助驾驶域控方案将迎来更大规模的应用需求。
辅助驾驶域控制器融合了芯片、算法、系统及中间件等软硬件,对于全栈研发及产品化交付能力的要求也更加严格。面向市场需求,几何伙伴(简称“G-PAL”)推出了自主研发的行泊一体辅助驾驶域控制器,以“软硬件高度集成+高性价比量产能力”为核心,为驾乘体验更加安全、拟人的辅助驾驶系统打造超强大脑,助力主机厂充分强化市场竞争力。
高效率算力利用,赋能“越级”驾乘体验
作为驱动智能汽车功能融合的核心部件,高性能辅助驾驶域控制器是辅助驾驶功能实现的基石,同时也是系统的感知决策中心。几何伙伴自主研发的行泊一体辅助驾驶域控制器,采用了多核异构计算架构(CPU+BPU+GPU),实现软硬件深度协同,可在L2及更高等级辅助驾驶场景中达成精准高效的感知数据处理、运算与决策,推动算力资源充分利用。
在算力平台方面,几何伙伴行泊一体域控制器提供了灵活丰富的配置选择,与地平线J6系列、华为MDC系列及英伟达Orin X系列等芯片充分适配,覆盖10 TOPS低算力至256 TOPS以上高算力平台,赋能不同级别汽车智能化驾驶需求。通过高效的系统框架设计及算法和软件的不断迭代,这套域控方案能够充分调用硬件资源,提高系统数据处理帧率,使系统在城区、高速、停车场等不同场域下的功能表现进一步优化,在中算力平台上也能够实现更高阶的辅助驾驶功能,为量产车型打造体验“越级”的组合辅助驾驶方案。
以几何伙伴行泊一体辅助驾驶3.0系统(以下简称“G-PAL 3.0系统”)为例,该方案采用了基于地平线J6平台开发的自研域控产品ADC32A,通过阶梯式算力配置打造Lite与Pro两大版本。聚焦城市高频驾驶场景,3.0 Lite系统搭载J6M芯片,针对中档车型,以128 TOPS算力即可实现高速NOA(领航辅助)及记忆行泊车、城区LCC PLUS(车道居中辅助增强)等轻量化城市NOA功能,3.0 Pro系统则对标中高档车型,应用双J6M芯片平台256 TOPS算力配置,可实现车位到车位等更广域的城市NOA功能。
资源深度复用,打造“集智提效”智慧大脑
当前,辅助驾驶域控制器标配车型区间主要集中于20-30万元的中高档车型,与此同时,随着辅助驾驶技术趋于普惠下放,该类域控产品正加速上车经济车型,市场份额逐年上升。此种趋势下,几何伙伴辅助驾驶域控方案通过软硬件资源的深度复用和算法优化,在性能体验全面升级的同时有效降低了系统整体成本,为辅助驾驶量产方案打造更具性价比的智慧大脑。
▲ 几何伙伴自研行泊一体辅助驾驶域控制器
感知硬件方面,几何伙伴行泊一体域控制器可支持多种传感器组合,为辅助驾驶安全打下坚实基础。G-PAL 3.0系统采用11V5R为标配方案,同时雷达硬件升级为5颗4D毫米波成像雷达(以下简称“4D成像雷达”)。针对更加复杂的感知环境,该套域控方案还支持灵活接入激光雷达、超声波等传感器,以满足进阶辅助驾驶场景的冗余传感需求。
基于端到端算法的跨模态数据融合,这套方案将摄像头图像和4D成像雷达点云作为模型输入,通过三网合一感知模型输出动态目标、静态目标及Occupancy Network感知结果,在高效利用平台算力资源的同时提升了感知性能。相较于常规视觉方案,这套方案具备更优越的全天时全天候感知能力,为后续决策和控制提供了可靠支撑,使整体系统鲁棒性更具保障。
而在软件能力方面,几何伙伴域控方案同样交出了一份优秀答卷。全套自研中间件EkaRT的部署,使该域控方案实现了更加灵活的软件配置,并通过统一抽象层整合FASTDDS和ICEORYX两种通信框架,借助零拷贝(Zero-Copy)技术进一步优化系统信息传输性能,实现海量数据的低时延交互。基于EkaRT中间件的分层解耦设计,几何伙伴行泊一体域控制器提供了更加标准化的通信与调度支持,充分保障系统功能的实现。
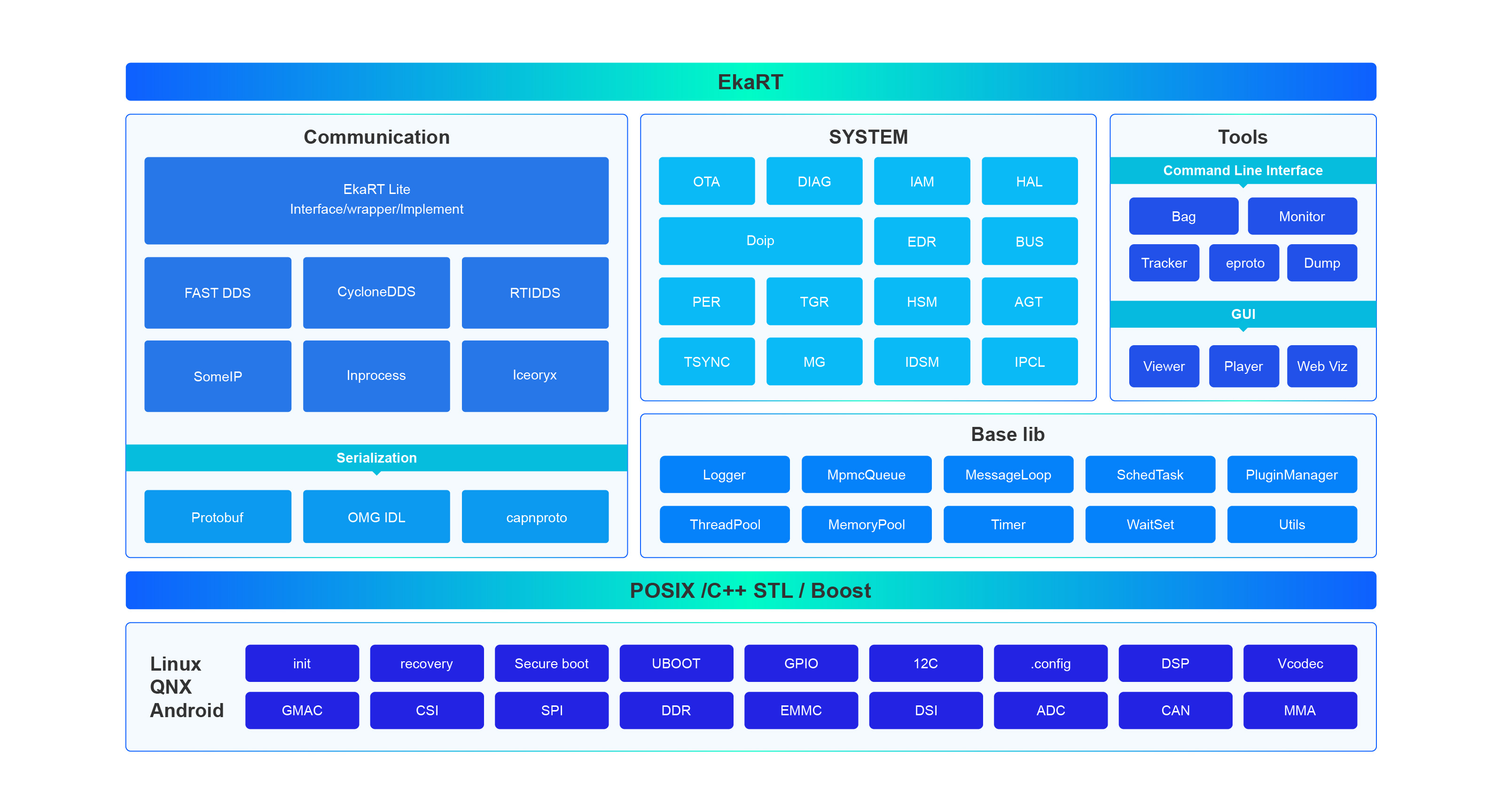
▲ 几何伙伴自研多平台中间件EkaRT
与此同时,这套行泊一体域控方案在成本控制与高效交付方面也做出了卓有成效的努力。
域控硬件设计上,GNSS、电源等多个硬件模块均可提供国产化方案选择,并通过积木式调用在不同硬件平台、以太网、串行解串器、GNSS及惯性导航等模块之间实现了电路资源的完全复用;散热采用一体化液冷方案,解决了大算力应用场景下的功耗问题,并提供优异的电磁兼容/辐射性能。
为更好契合主机厂规模量产需求,几何伙伴域控方案的软件应用采用了平台化设计,大幅降低开发工作量。中间件通过松耦合设计实现了模块化架构,允许主机厂按需组合感知、规划、通信等功能模块,实现不同功能域的灵活配置。EkaRT的层级化抽象能力可帮助主机厂在同一中间件平台上完成不同硬件方案适配,并提供标准化API接口与全套辅助工具链,真正实现算法模块即插即用,加速开发迭代流程,支持持续OTA升级。
通过软硬件高效协同,几何伙伴域控方案可实现行车与泊车场景下的传感器数据和计算资源共享,降低硬件冗余成本并减少算力空置,同时支持座舱域与辅助驾驶域的通信交互。这种行泊一体高度集成和舱驾协同开发能力,亦与当下智能汽车跨域融合的发展趋势高度契合,助力整车系统更好实现“集智提效”。
多重安全设计,为系统保驾护航
安全是一切驾驶体验的根本所在,若要实现更高安全性能的辅助驾驶,在域控规划层面就必须考虑到安全冗余设计,以及功能安全和信息安全策略,确保辅助驾驶系统的智慧核心能够稳健运行。
几何伙伴行泊一体域控方案通过Lock-Step双锁步核机制,使一对DCLS ARM R52内核当中的一个内核能够充当主功能内核的冗余备份;传感器硬件方面,基于前融合感知算法模型,视觉和4D成像雷达可实现ODD覆盖范围更广的360°安全冗余感知;此外,在3.0 Pro及以上版本域控方案中,通过双J6M芯片方案,主控制器能够实现对副控制器的部分冗余,保障极端条件下的控车功能正常运行,为行车安全保驾护航。
针对功能安全,几何伙伴行泊一体域控制器集成了符合功能安全ASILD 的MCU子系统和满足ASILB的主处理器,片上存储广泛采用ECC保护,具备实时安全诊断功能,并可实现过压、欠压、温度、时钟监测和Window Watchdog监测。基于高性能、高稳定性、低时延、高性价比的设计理念,几何伙伴域控制器在产品设计上完全符合 ISO26262的功能安全要求,整体系统功能安全等级最高可达到ASIL D级别。
同时,为了确保信息安全,该域控方案还使用了多个规格的加密硬件加速器,支持安全启动与ARM TrustZone嵌入式安全架构,可实现关键信息加密解密,进一步提升信息传输的安全稳定。
写在最后
得益于强大的全栈自主研发实力、车规级全自动产线质量与严苛的品控体系,几何伙伴行泊一体辅助驾驶域控产品为客户带来了更高性价比的软硬集成解决方案,已与上汽、江汽等主机厂建立良好合作关系,并吸引到更多客户的关注。未来,几何伙伴将持续打磨方案能力,以市场需求为导向,助力主机厂加速实现量产落地,推动安全好用的辅助驾驶功能从“高端选配”走向“全民标配”。











